AstroAnt
One of my designed tiny robots will be sent to the Lunar South Pole in the IM-2 landing mission!
Step I --- parabolic flights on Earth
This work is built on our group's past project Rovable - a miniature robotic swarm that can move on clothing and build an on body sensor network. We extend the applications of this platform to space. Since most of space systems (space station, satellite, spacecraft, etc.) are covered with protection Beta cloth, we want to build an on body sensor network for these space platforms. With modular design, each robot can carry different sensor payload to do inspection sensing for the space systems from outside.
The first step is testing such a miniature robotic swarm platform in microgravity environment. The test is divided into 2 phases: mobility test and sensor capability test.
Each robot has magnet rings on the wheels, which make them able to attach to any magnetic surfaces, or flexible fabric with another pair of magnet wheels that pinch the fabric in middle, which is shown as following image.
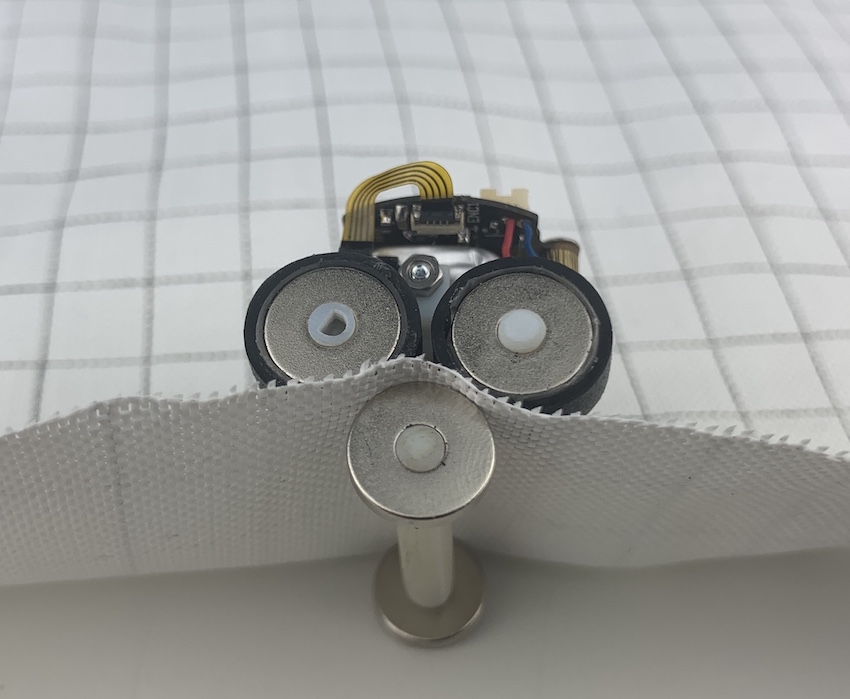 Model 1 moving on Beta cloth simulant with another pair of wheels pinching the fabric.
Model 1 moving on Beta cloth simulant with another pair of wheels pinching the fabric.

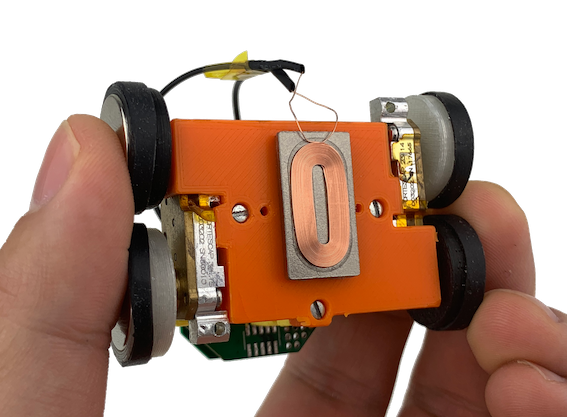
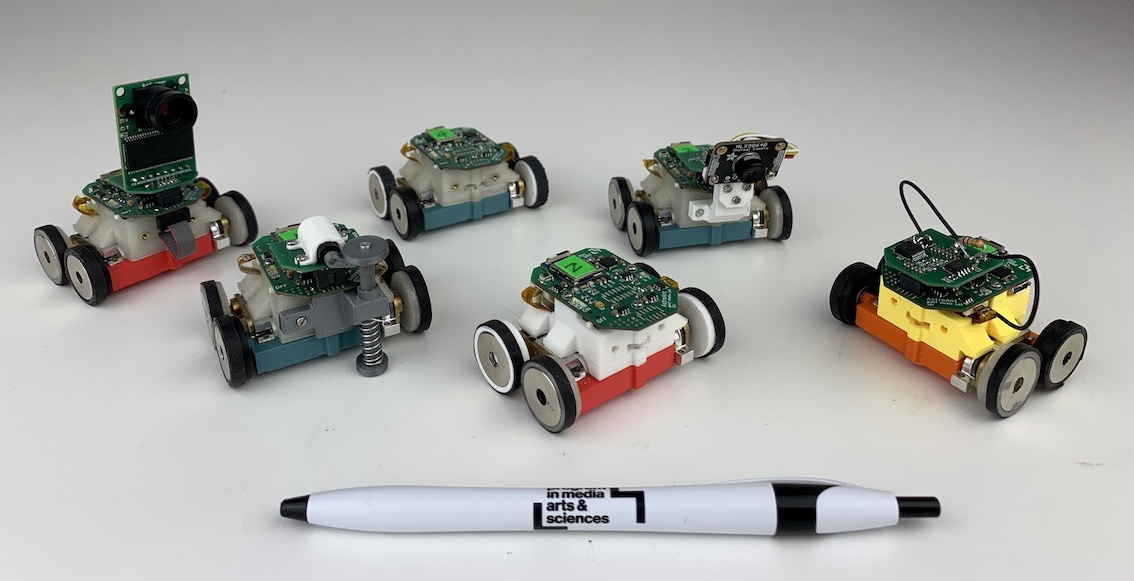 Two models I designed for parabolic flights (Model 1 and Model 2).
Two models I designed for parabolic flights (Model 1 and Model 2).
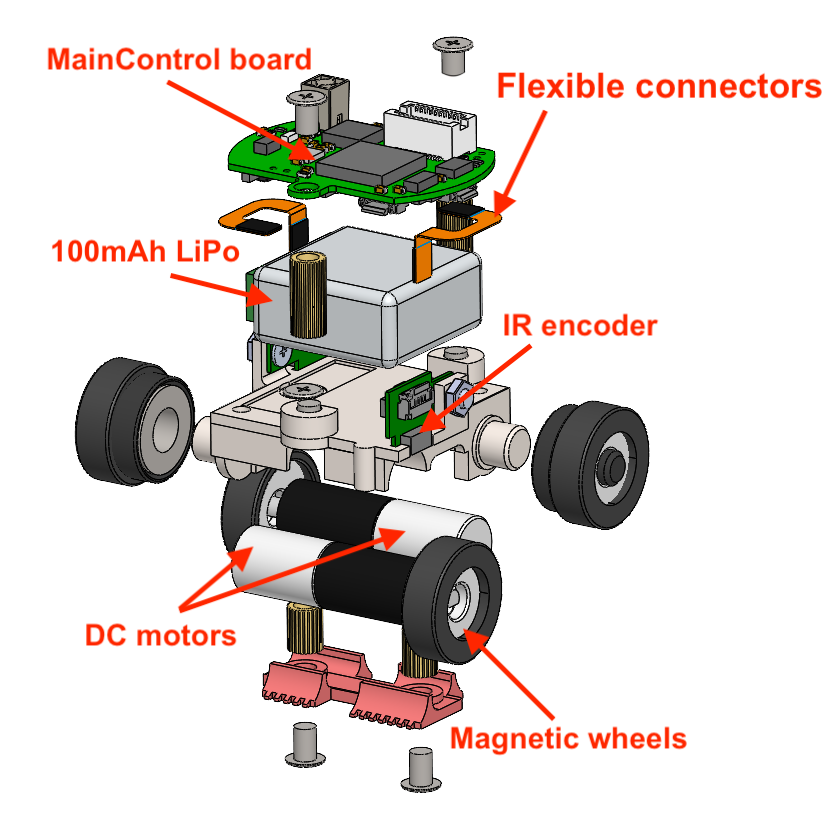
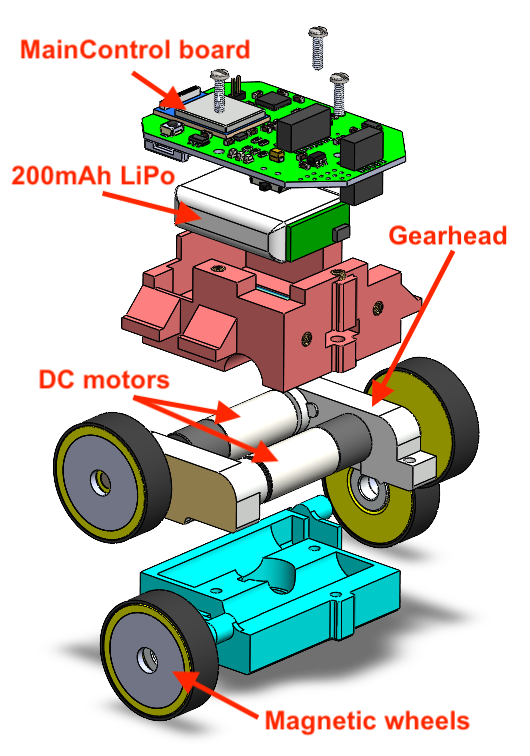 Explode view of the Model 1 and Model 2.
Explode view of the Model 1 and Model 2.
The model 1 is designed for testing the mobility of the such actuation mechanism.
Each model was tested on in two parabolic flights (30 parabolas/flight).
 Setting up Model 1 test and Parabolic flight for testing Model 1.
Setting up Model 1 test and Parabolic flight for testing Model 1.
Model 1 was tested surfaces that are made up of different materials, including steel, aluminum with magnetic paint, and Beta cloth simulant. We tested the speed and obstacle overcoming capability of the Model 1 in Lunar/Martian/Zero gravity environment.
The model 2 is bigger, which has larger battery (longer lifetime), and can carry bigger sensor payload. We tested the sensing capability of the Model 2 in Lunar/Martian/Zero gravity environment.
Two models I designed for parabolic flights (Model 1 and Model 2).
The Model 2 can carry different sensor payloads. The payloads we tested include visual camera, IR camera, thermopile.
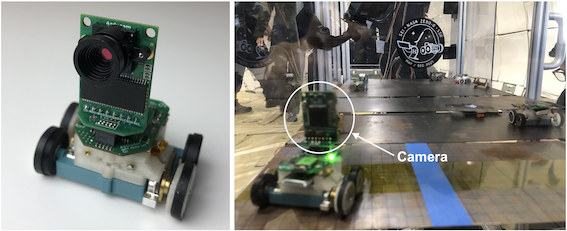
 Model 2 with camera module and a frame of the video the robot tool during the parabolic flight.
Model 2 with camera module and a frame of the video the robot tool during the parabolic flight.
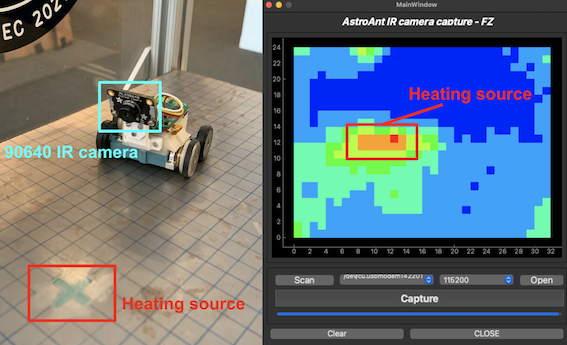 Model 2 with IR camera module and a heatmap of the surface it took. With an IR camera equipped, the
robot can get heat map of the surface it's moving on, and find the abnormal overheating/overcooling parts.
Model 2 with IR camera module and a heatmap of the surface it took. With an IR camera equipped, the
robot can get heat map of the surface it's moving on, and find the abnormal overheating/overcooling parts.
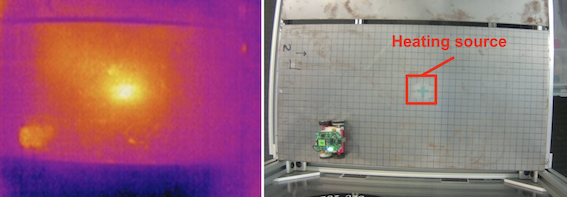 Model 2 with thermopile and the localization of the abnormal overheating source.
With a thermopile installed on the bottom of the robot, it can do contactless temperature measurement
of the surface it's moving on. By running a "L" shape track around the abnormal heating source, it can
localize where the heating source is. The robot applies dead-reckoning for tracking its position.
Model 2 with thermopile and the localization of the abnormal overheating source.
With a thermopile installed on the bottom of the robot, it can do contactless temperature measurement
of the surface it's moving on. By running a "L" shape track around the abnormal heating source, it can
localize where the heating source is. The robot applies dead-reckoning for tracking its position.
 Model 2 with Eddy current sensor
The robot was put on steel board with/without metal flaw (square hole, cutting through line).
Model 2 with Eddy current sensor
The robot was put on steel board with/without metal flaw (square hole, cutting through line).
In this project, I finished the whole hardware, firmware, software, test equipment, and experiment design and development. The paper is under review now and coming soon.
Step II --- To the Moon to stay!!!
I designed a new model of the AstroAnt which will be sent to the moon by the middle of the year of 2024.
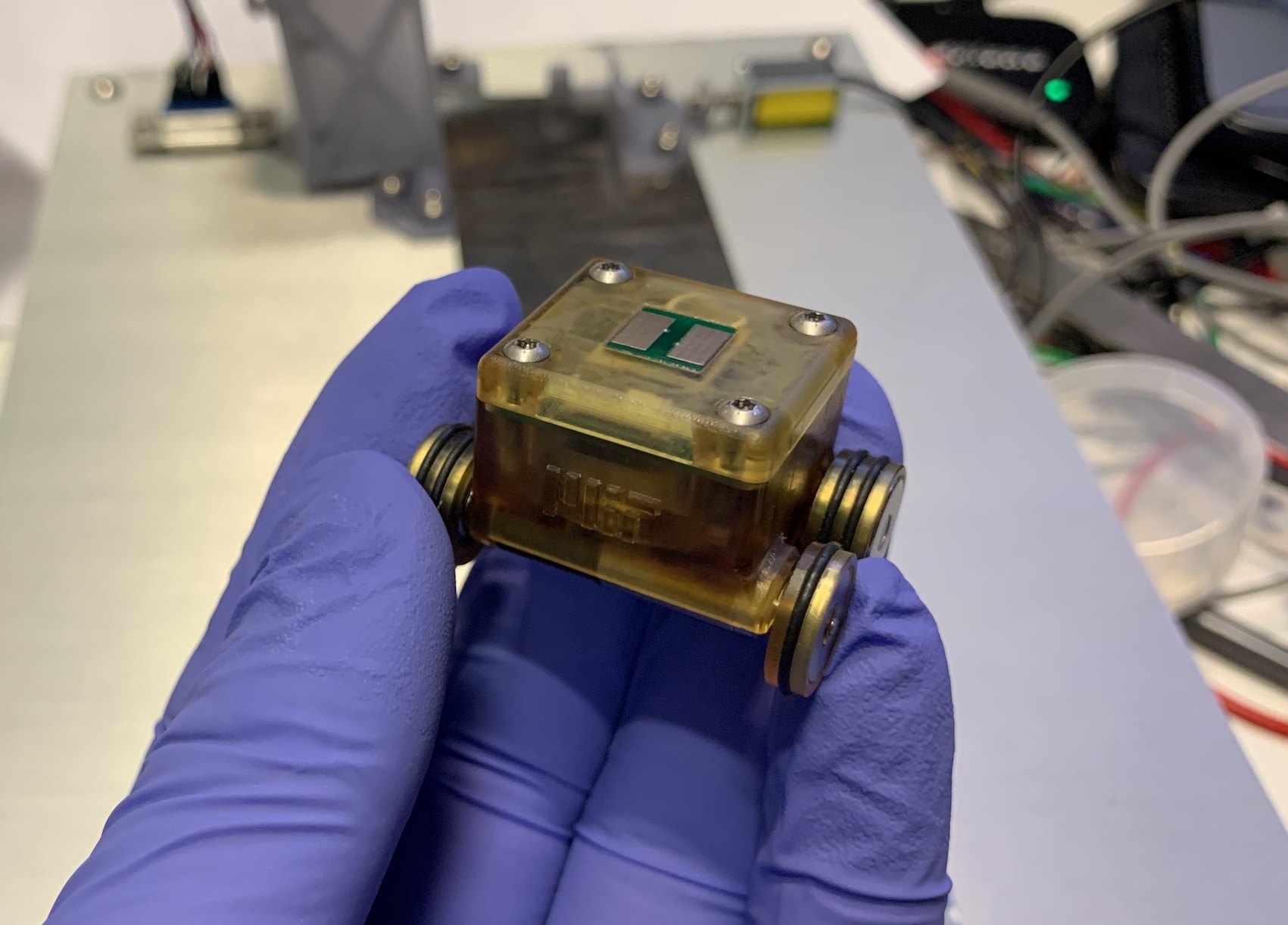
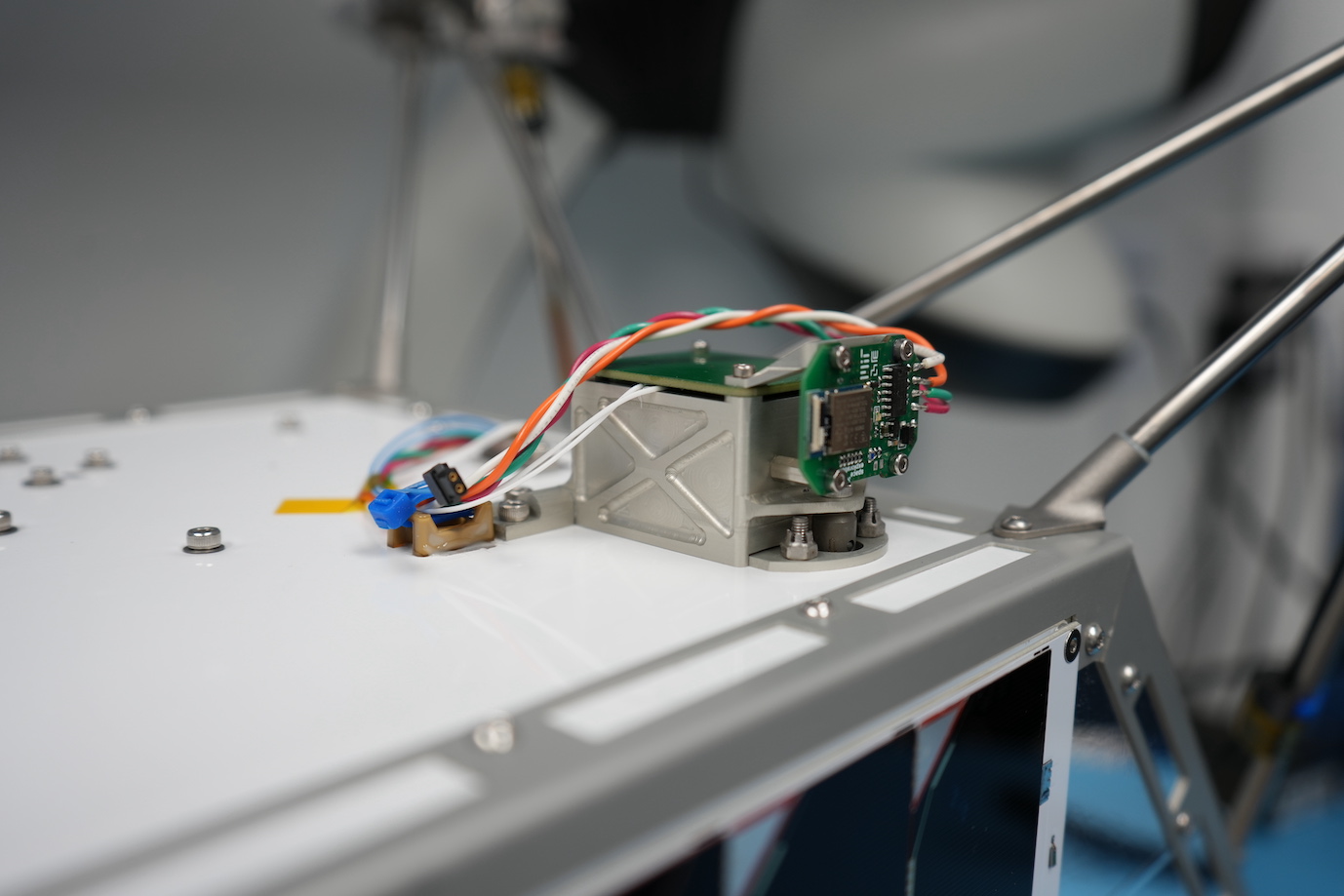
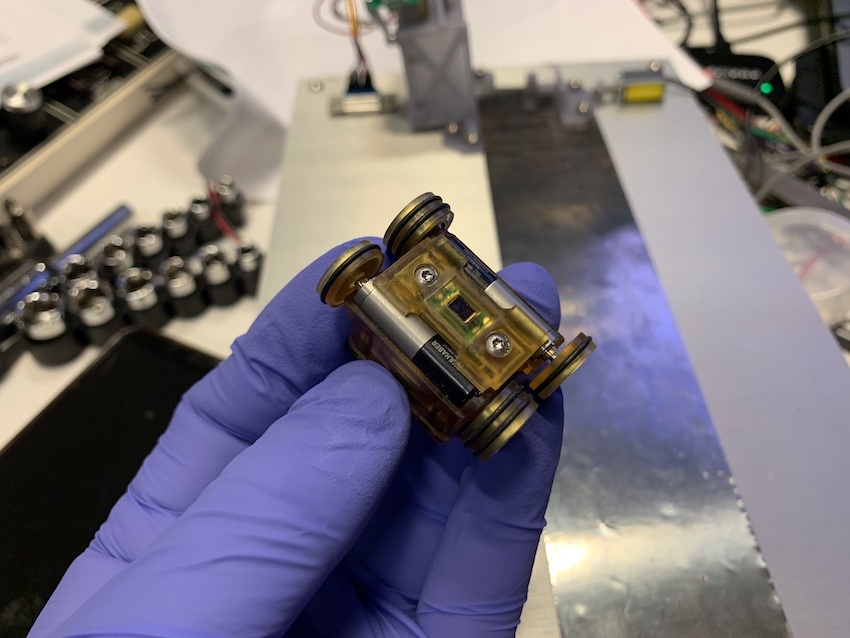 Lunar mission model. It has a thermopile on the bottom.
Lunar mission model. It has a thermopile on the bottom.
Our AstroAnt robot will be working on top of the MAPP-1 rover (developed by the Luanr outpost). The top of the rover is the radiator of the thermal system. Our AstroAnt robot can measure temperature from different positions and help with monitoring the performance of the thermal system.
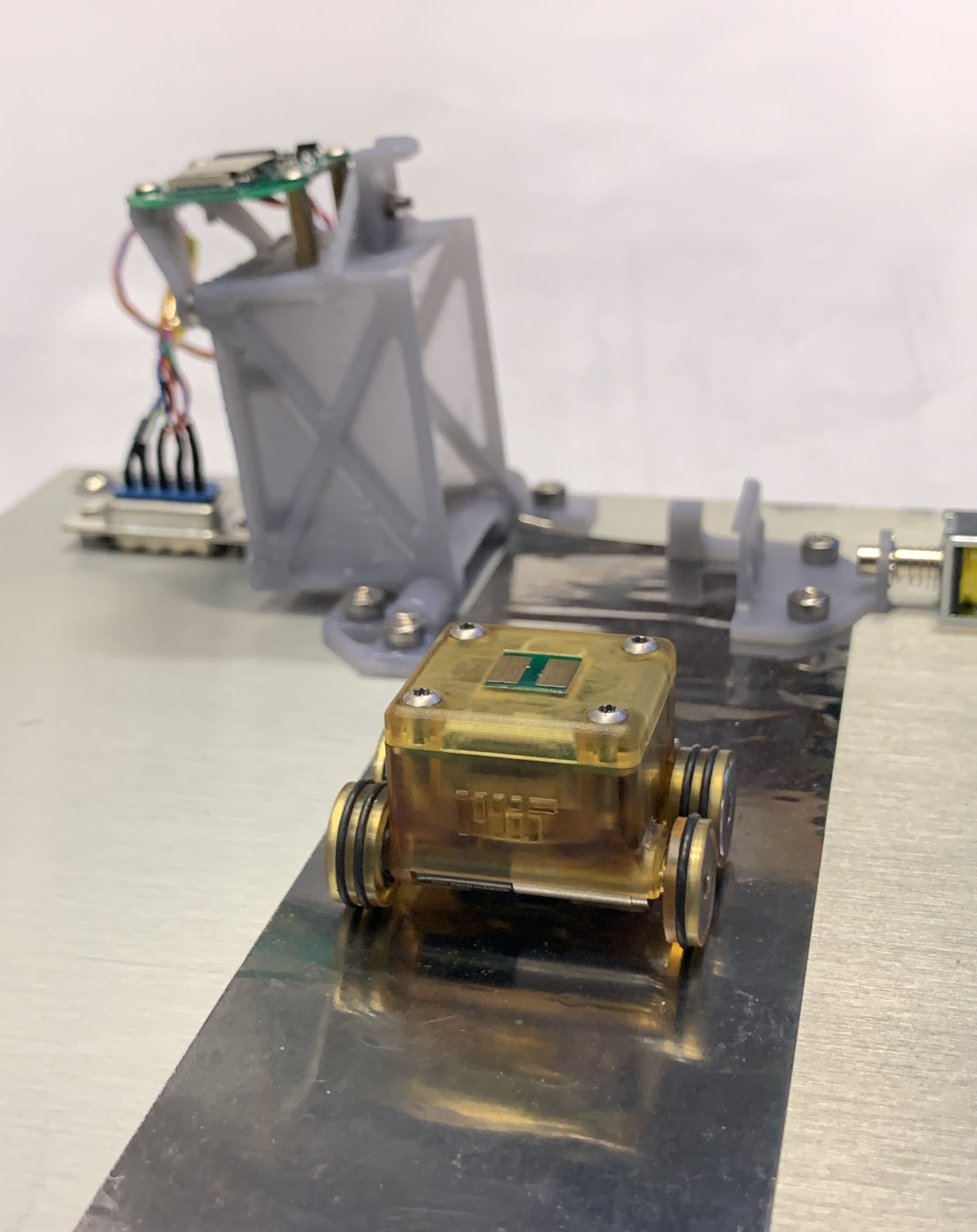 Lunar mission model is moving on the rover top simulant.
Lunar mission model is moving on the rover top simulant.
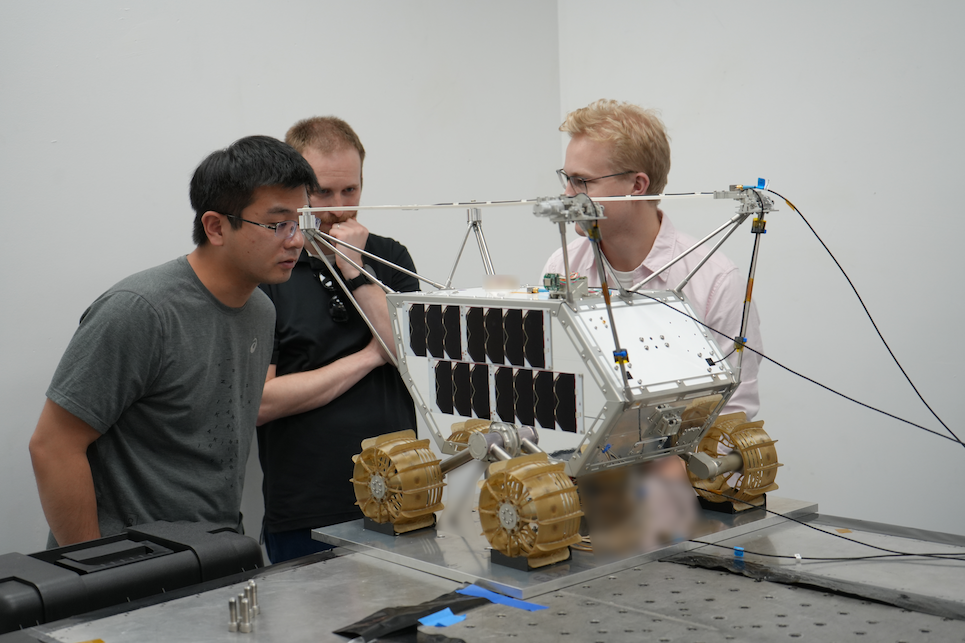 The garage on top of the rover which will protect the AstroAnt robot before
deployment, and we are preparing the vibration test for the rover and the AstroAnt
system on top.
The garage on top of the rover which will protect the AstroAnt robot before
deployment, and we are preparing the vibration test for the rover and the AstroAnt
system on top.